




If you've ever seen a child wave a "magic wand" over a picture book and trigger sound effects, chances are the wand hides a magnet, and the book hides magnetic sensors. This post explains a strong design for these experiences. It uses Hall-effect or magnetoresistive sensors (AMR/GMR/TMR). We will discuss why it works, the trade-offs, and useful engineering tips from prototyping to production.

Magic Wand Sound Book by Usborne
Interaction Model
A wand with a small magnet is brought near specific spots on the page.
Magnetic sensors embedded in the book detect the field and trigger audio or effects.
Each sensor maps to a "hidden hotspot," enabling pixel-precise, reliable interactions.

System Architecture
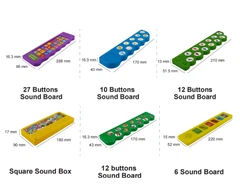
Magnetic sensor array: Distributed Hall or magnetoresistive sensors positioned near page hotspots.
Control and audio: MCU/voice IC scans sensors, debounces events, maps to audio indices, and plays sounds.
Power and acoustics: Battery, amplifier, and speaker in a compact module.
Key advantages: Non-contact activation through paper, resistant to sweat/humidity, and highly targeted "point" interactions.

How is the module part looks like inside of the book
Why Magnetic Sensing Instead of Capacitive Touch?
Non-contact reliability: Works through cardboard/laminate; unaffected by moisture or finger conductivity.
Clear spatial targeting: Sensors act as discrete points-great for "tap here" UX.
Low false triggers: Immune to static/human capacitance; less sensitive to electrical noise.
Hidden and durable: Sensors and traces are completely concealed-high industrial design freedom.
Power-friendly: Switch-type Hall sensors support polling or interrupt wakeup-easy to design for long battery life.
Manufacturing consistency: Paper material variation impacts magnetics far less than capacitive touch.
Stable UX: Any user or wand material works, as long as there's a magnet.
Rich behaviors: Different polarities (N/S) or field strengths can map to different actions. 🎯

Wave wand on book and magic sound will comes out
Trade-offs to Consider
Requires a dedicated prop: No magnet, no trigger-wand loss impacts usability.
Distance and orientation sensitivity: Magnetic field decays rapidly; alignment and polarity matter.
Crosstalk risk: Strong magnets or tight sensor spacing can trigger adjacent points-layout and firmware must mitigate.
Magnetic interference: Nearby speaker magnets, staples, or magnetic clasps can bias sensors-plan placement and shielding.
BOM scaling: High-sensitivity AMR/GMR/TMR costs more than simple Hall; many hotspots mean more sensors and routing.
Mechanical stack-up: Thicker covers/foam reduce sensitivity; keep sensors close to the page surface.
Calibration needs: Magnet variability and assembly tolerances require thresholds and auto-baselining in firmware.
Safety and messaging: Magnets must be child-safe; warn about potential effects on magnetic cards/devices.

To avoid the magnet interference, every sensor should be far away from each other
Working Principle: Hall vs Magnetoresistive
Hall-effect sensors:Measure magnetic flux density �B; available as digital (switch) or analog.Digital Hall: Threshold-based, low-cost, robust-ideal for crisp "point triggers."Analog Hall: Provides magnitude/direction hints-better distance estimation and anti-false-trigger logic.
Magnetoresistive sensors (AMR/GMR/TMR):Higher sensitivity and angle detection; better for weak fields or nuanced interactions.Costlier and potentially more complex to integrate, but excellent when distance or directional resolution matters.

For kid sound book, magnettoresistive sensor will be enough.
Firmware Strategies that Make It Feel "Magical"
Baseline auto-calibration: Record idle magnetic bias at power-on to adapt to environment drift.
Debounce and dwell: Require �≥50–150��t≥50–150ms continuous detection before triggering for reliable UX.
Nearest-strongest wins: Prioritize the sensor with the strongest field to prevent multi-spot triggers.
Polarity-aware logic: Different responses for N vs S pole if desired.
Low-power scanning: Poll slowly in standby; wake fast on detection or use interrupt-capable sensors. 🔋
Layout and Mechanical Design Tips
Sensor spacing: Match printed hotspot spacing (commonly 2–4 cm) and add ground rings/isolation to reduce crosstalk.
Wand magnet spec: Small NdFeB (e.g., N35–N52) cylinder; uniform outward polarity simplifies firmware.
Keep sensors close: Thin cover materials and shallow foam increase effective range.
Interference management: Distance sensors from speaker magnets; avoid staples/magnetic closures near hotspots.
Common Debugging Scenarios
Dead hotspot: Check sensor soldering, continuity, or artwork-to-sensor alignment.
False triggers: Magnet too strong, spacing too tight, or thresholds too low-raise thresholds and apply nearest-strongest policy.
Short activation distance: Use stronger magnets, reduce cover thickness, switch to analog Hall or AMR, or increase gain.
Audio issues: Often power or speaker-related-separate from sensing logic.
A Practical Implementation Pattern
Sensor array: Distributed switch-type Hall sensors for discrete "tap points."
MCU: Scans inputs, runs debounce/prioritization, maps to audio tracks.
Audio module: Battery, PMIC, flash/ROM, amp, speaker housed in a compact enclosure connected via multi-core cable.

Need design a guidance position for every single page to wand attachment
If You're Prototyping or Scaling
Sensor choice:Cost-effective: Digital Hall (e.g., A3144-class) for point triggers.Higher performance: TMR/AMR for longer range and directional sensitivity.
Wand design:Cylindrical NdFeB magnet with consistent polarity; adjust diameter/length for range.Add a plastic guide tip for precise pointing and kid-friendly ergonomics. 🪄
Test and tune:Map trigger distance per hotspot using a small magnet; record strength vs distance curves.Use LEDs/serial logs to verify sensor-to-audio mapping.Implement anti-retrigger and timeout to avoid rapid swipe multiple triggers.
When to Prefer Other Technologies
Choose magnetic sensing for "point-to-sound" experiences requiring stability and environmental robustness.
Consider capacitive touch if you need swipe, multi-touch, or area gestures.
Use higher-sensitivity magnetoresistive sensors if you need longer range or directional discrimination with fewer sensors.

Inner page artwork reference
The only downside of this technique in gameplay is that you can trigger all the sounds. This happens as long as you keep exploring with the magic wand on the same page.
Designing magical books is about hidden engineering that feels effortless to kids. With Hall/AMR sensors, you get strong non-contact interaction. They provide tight spatial control and reliable manufacturing. This is exactly what you need for fun storytelling on a large scale. ✨





